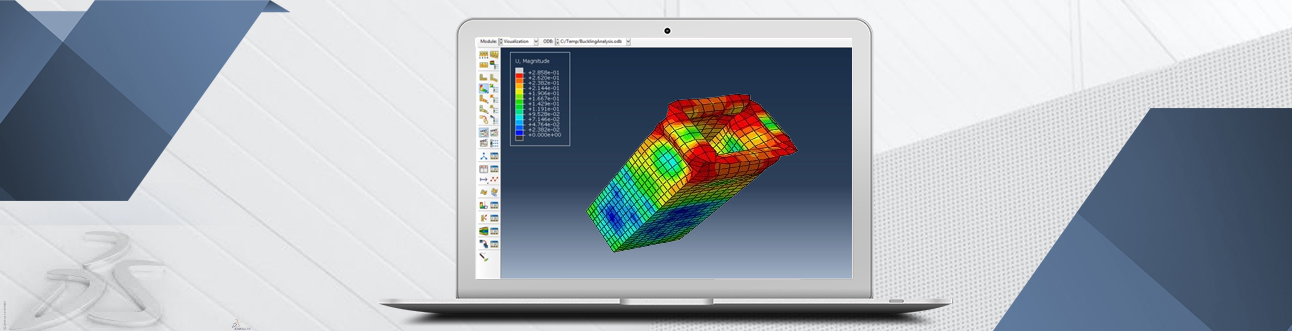
How to model a structure undergoing global instability in Abaqus?
- Vignesh Pagadalu
- May 25, 2021
A nonlinear static problem can be unstable as a result of global buckling or material softening. If the load-displacement response of the model seems to be reaching a load maximum and there is the possibility of global instability or negative stiffness, two approaches to solving the problem can be used — static or dynamic analysis.
If the structure is reaching a buckling load in a static analysis, perform a Riks analysis
The Riks method assumes that the global instability can be controlled by modification of the applied loads. This means the loss in stability cannot be too severe; that is, there cannot be a sharp bifurcation in the load-displacement curve. Therefore, structures such as flat sheets, cylinders, and spheres that have a sudden significant loss of stiffness after buckling must have some imperfection built into the original geometry.
This can be done by using the *IMPERFECTION option to modify the original geometry by adding imperfections. The best approach is to use experimentally determined imperfections; however, since these measurements may not be available, the *IMPERFECTION option can use combinations of the eigen modes from a previous buckling analysis as the imperfections to the original geometry.
If the Riks method fails to converge near a limit or bifurcation point (buckling load), the problem may be that the loss in stiffness is too severe. Instability problems that exhibit a sharp transition often require a limit on the maximum incremental arc length to get past the transition point or to have larger imperfections built into the geometry.
If a dynamic analysis is desired
Abaqus/Explicit should be considered as the most robust approach, particularly in the presence material failure, extreme deformation, or rapid changes in contact state. If the loss in stability is not too severe, or only the load maximum is to be computed rather than a fully collapsed configuration, then a dynamic analysis in Abaqus/Standard may be completed with less run time. Choose the APPLICATION parameter on DYNAMIC to control the amount numerical damping that is applied to the integration operator. If a dynamic analysis is used in Abaqus/Explicit, the structure will vibrate once it has passed the instability and you must decide how to damp the vibrations if a quasi-static solution is required.
Global instabilities can also be stabilized in a static analysis with viscous forces. Although not intended as a primary solution technique for global instabilities, automatic stabilization can be used in the static, coupled temperature-displacement, soils and quasi-static procedures. Automatic stabilization will add viscous damping to the structure, which may allow the solution to go beyond the instability point.
Discrete dashpots can also be used to stabilize a problem of this type
With either technique, the energy dissipated by the artificial viscous forces (output variable ALLVD for discrete dashpots or ALLSD for automatic stabilization) should remain small compared to the total internal energy (output variable ALLIE) in the problem. The nodal viscous forces should also be small when compared with typical forces in the problem (use nodal output variable VF).
Recent Posts
-

From Prototypes to Production: How Additive Manufacturing is Shaping Atmanirbhar Bharat
The conversation around additive manufacturing (AM) in India has evolved considerably over the past decade. What was once viewed primarily as a prototyping technology is…
-
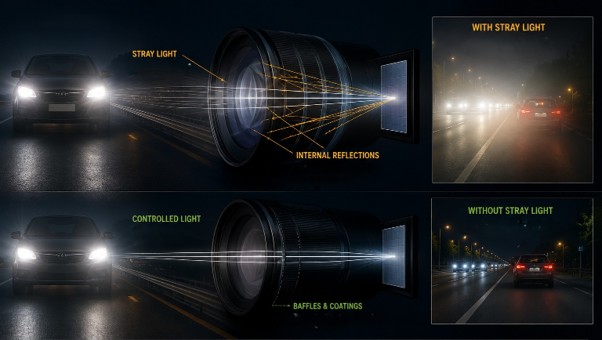
Identify Stray Light in Imaging Systems with LightTools
Stray light is undesired light radiation that interacts with the components of a system and degrades its performance by generating noise, that significantly reduces image…
-
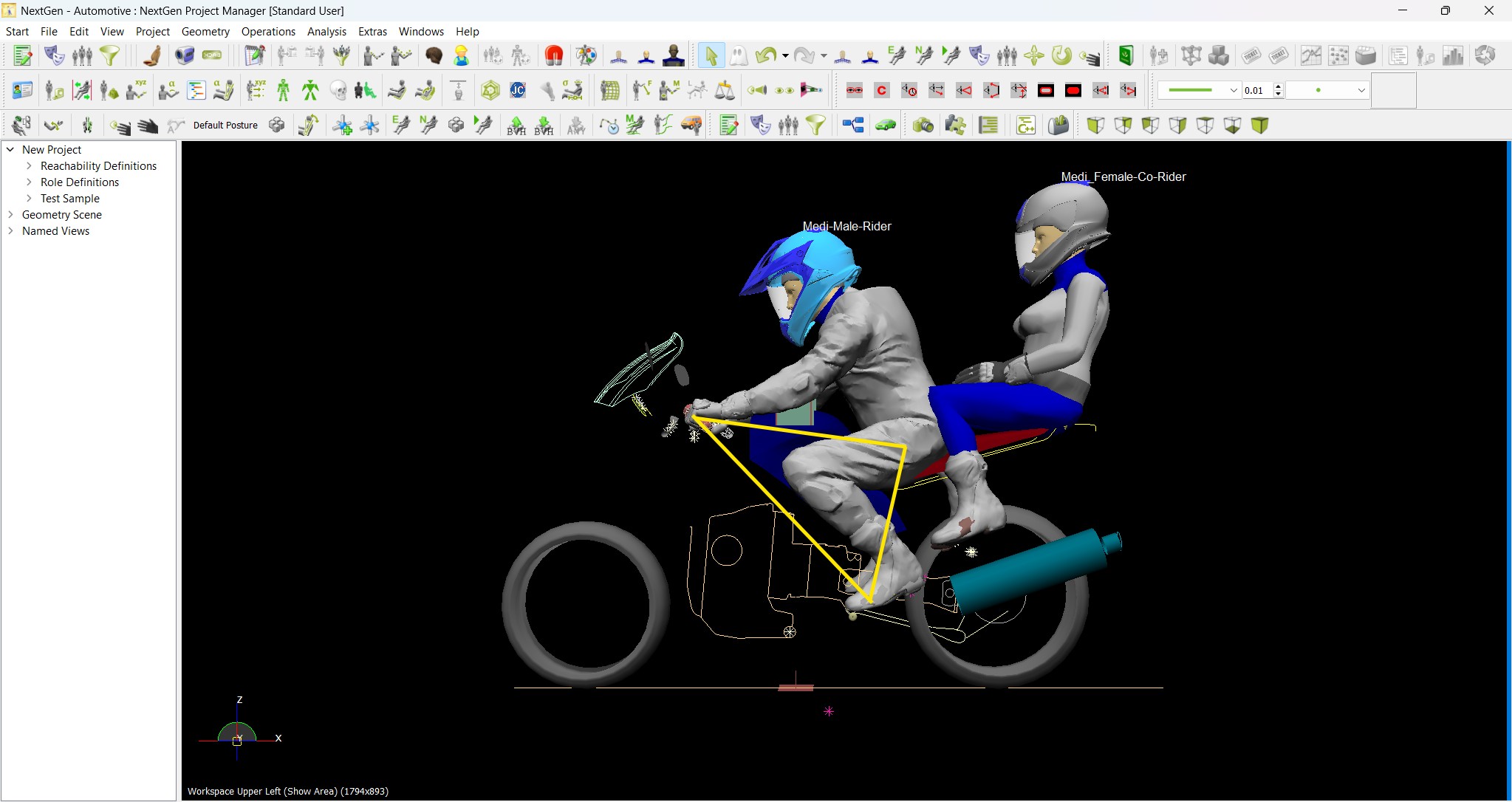
Redefining the Riding Experience with RAMSIS
In two‑wheeler design, comfort and safety start with the rider. RAMSIS (Realistic Anthropometric Mathematical System of Interior Comfort Simulation) is an ergonomic simulation platform that…
-

Enhancing Product Understanding through 3D Technical Illustrator
The 3D Technical Illustrator role within the 3DEXPERIENCE Platform enables organizations to transform complex engineering data into clear, interactive, and visually rich technical documentation. In…
-
Transforming Physical Parts into Digital Models with CATIA 3DEXPERIENCE Reverse Engineer role
Reverse engineering has become a critical capability in modern product development, especially when working with legacy components, competitor benchmarking, or physical prototypes that lack digital…
-

Fixing Search Service Down Issue in 3DEXPERIENCE Platform
Search is one of the most critical features in the 3DEXPERIENCE platform. If the search service goes down, users cannot find objects, documents, or data—impacting…
-
Common Installation Errors and How to Fix Them in 3DEXPERIENCE
The 3DEXPERIENCE Platform is a powerful solution used by industries worldwide for product lifecycle management (PLM), simulation, and collaboration. However, installing 3DEXPERIENCE—especially on-premise—can be complex…
-

From Classroom to Industry: Empowering Future Engineers with the 3DEXPERIENCE Platform
In today’s fast-evolving engineering and design landscape, educational institutions must go beyond conventional CAD teaching methods. While standalone tools like CATIA V5, SOLIDWORKS, or traditional…
- Vignesh Pagadalu
- May 25, 2021
How to model a structure undergoing global instability in Abaqus?
A nonlinear static problem can be unstable as a result of global buckling or material softening. If the load-displacement response of the model seems to be reaching a load maximum and there is the possibility of global instability or negative stiffness, two approaches to solving the problem can be used — static or dynamic analysis.
If the structure is reaching a buckling load in a static analysis, perform a Riks analysis
The Riks method assumes that the global instability can be controlled by modification of the applied loads. This means the loss in stability cannot be too severe; that is, there cannot be a sharp bifurcation in the load-displacement curve. Therefore, structures such as flat sheets, cylinders, and spheres that have a sudden significant loss of stiffness after buckling must have some imperfection built into the original geometry.
This can be done by using the *IMPERFECTION option to modify the original geometry by adding imperfections. The best approach is to use experimentally determined imperfections; however, since these measurements may not be available, the *IMPERFECTION option can use combinations of the eigen modes from a previous buckling analysis as the imperfections to the original geometry.
If the Riks method fails to converge near a limit or bifurcation point (buckling load), the problem may be that the loss in stiffness is too severe. Instability problems that exhibit a sharp transition often require a limit on the maximum incremental arc length to get past the transition point or to have larger imperfections built into the geometry.
If a dynamic analysis is desired
Abaqus/Explicit should be considered as the most robust approach, particularly in the presence material failure, extreme deformation, or rapid changes in contact state. If the loss in stability is not too severe, or only the load maximum is to be computed rather than a fully collapsed configuration, then a dynamic analysis in Abaqus/Standard may be completed with less run time. Choose the APPLICATION parameter on DYNAMIC to control the amount numerical damping that is applied to the integration operator. If a dynamic analysis is used in Abaqus/Explicit, the structure will vibrate once it has passed the instability and you must decide how to damp the vibrations if a quasi-static solution is required.
Global instabilities can also be stabilized in a static analysis with viscous forces. Although not intended as a primary solution technique for global instabilities, automatic stabilization can be used in the static, coupled temperature-displacement, soils and quasi-static procedures. Automatic stabilization will add viscous damping to the structure, which may allow the solution to go beyond the instability point.
Discrete dashpots can also be used to stabilize a problem of this type
With either technique, the energy dissipated by the artificial viscous forces (output variable ALLVD for discrete dashpots or ALLSD for automatic stabilization) should remain small compared to the total internal energy (output variable ALLIE) in the problem. The nodal viscous forces should also be small when compared with typical forces in the problem (use nodal output variable VF).